by Simon Höckerbo | Nov 11, 2025
PI: Kalle Åström, Lund University co-PI: Fredrik Gustafsson, Linköping University Tracking and mapping systems are central to many technologies, from wildlife monitoring and search-and-rescue to autonomous vehicles and industrial safety. They typically consist of a...
by Simon Höckerbo | Nov 11, 2025
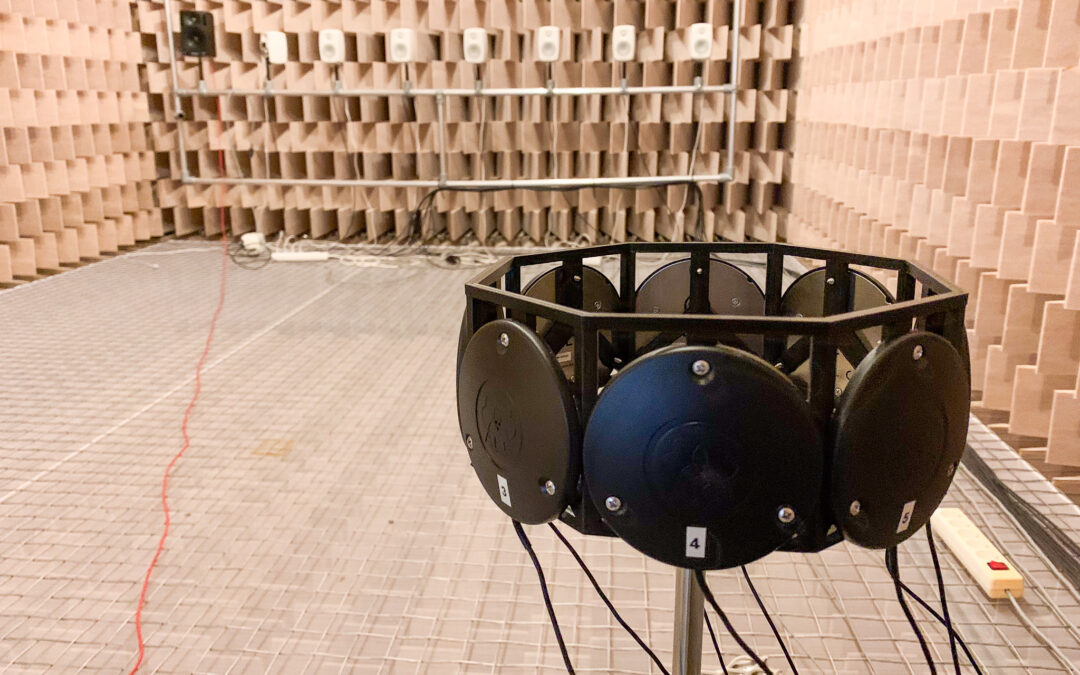
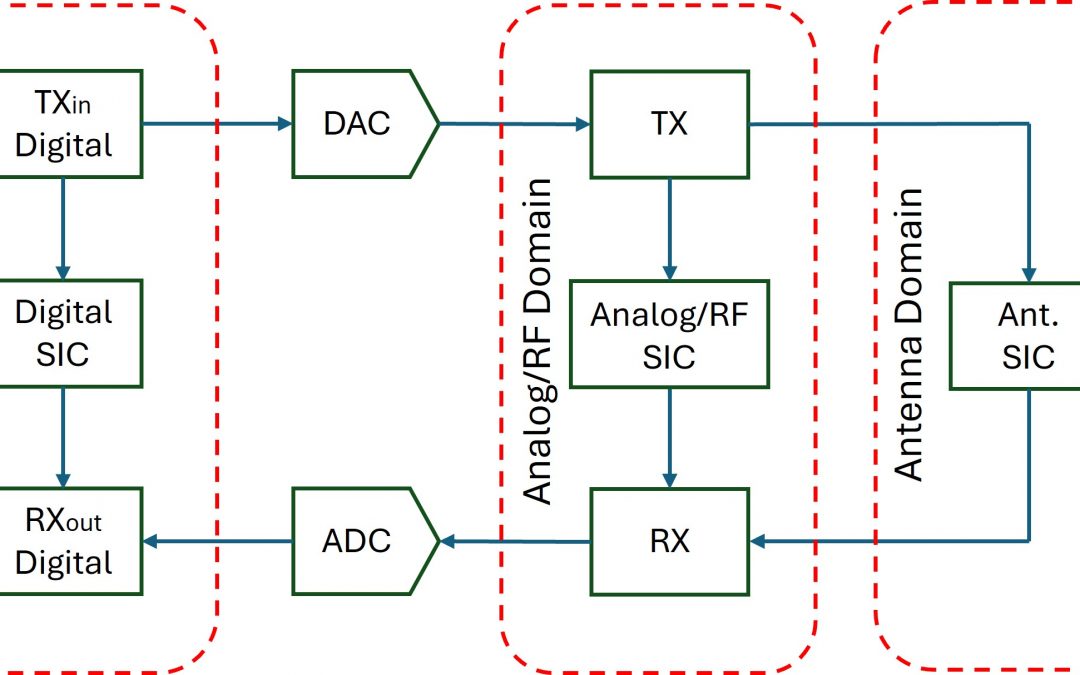
PI: Fredrik Tufvesson, Lund University co-PI: Erik G. Larsson, Linköping University Distributed massive MIMO (D-MIMO) has been identified as a prominent technology for 6G with desired benefits in terms of capacity, reliability, and coverage, but the technology comes...
by Simon Höckerbo | Nov 11, 2025
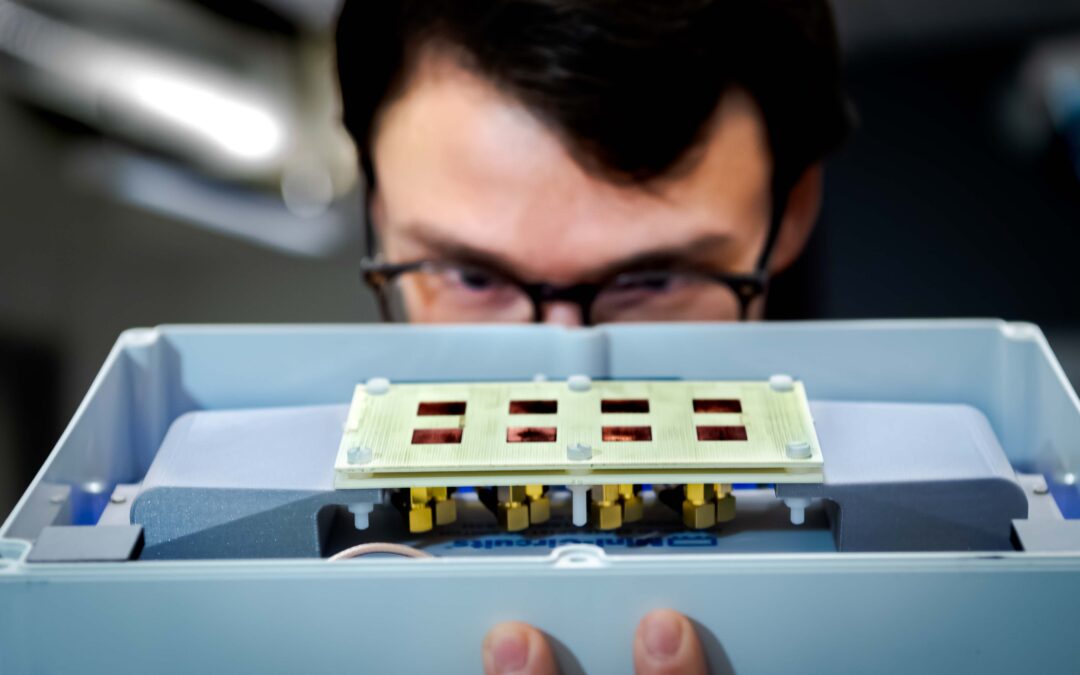
PI: Henrik Sjöland, Lund University co-PI: Alireza Saberkari, Linköping University The project addresses design of radio frequency integrated circuits (RFICs) for 6G repeaters in frequency range 3 (FR3), frequencies between 7 GHz and 20 GHz also known as centimeter...

by Simon Höckerbo | Nov 11, 2025
PI: Per Runeson, Lund University co-PI: Christian Kowalkowski, Linköping University With the increasing use of AI models in society and business, the issue of using general vs. specialized models (e.g. per task, company, country or domain) is raised. From a business...
by Simon Höckerbo | Nov 11, 2025
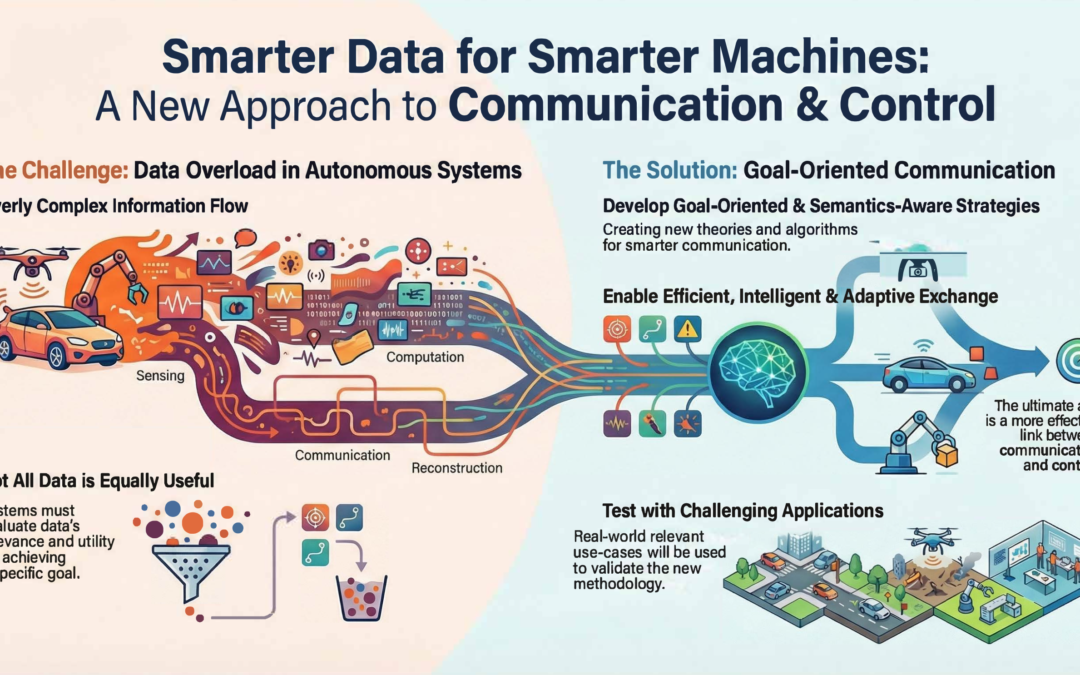
PI: Nikolaos Pappas, Linköping University co-PI: Johan Thunberg, Lund University This project addresses the growing demands on information and mobile technologies in the digital era, where autonomous systems, including robots, vehicles, and drones, generate vast...
