by Tove Kvarnström | Feb 28, 2023
PI: Richard Pates (LU); co-PI: Anders Hansson (LiU) Many classical optimal methods for estimation and control have provable robustness and performance guarantees that can enhance the sustainability and resilience of engineering systems. However, their implementation...
by Tove Kvarnström | Feb 28, 2023
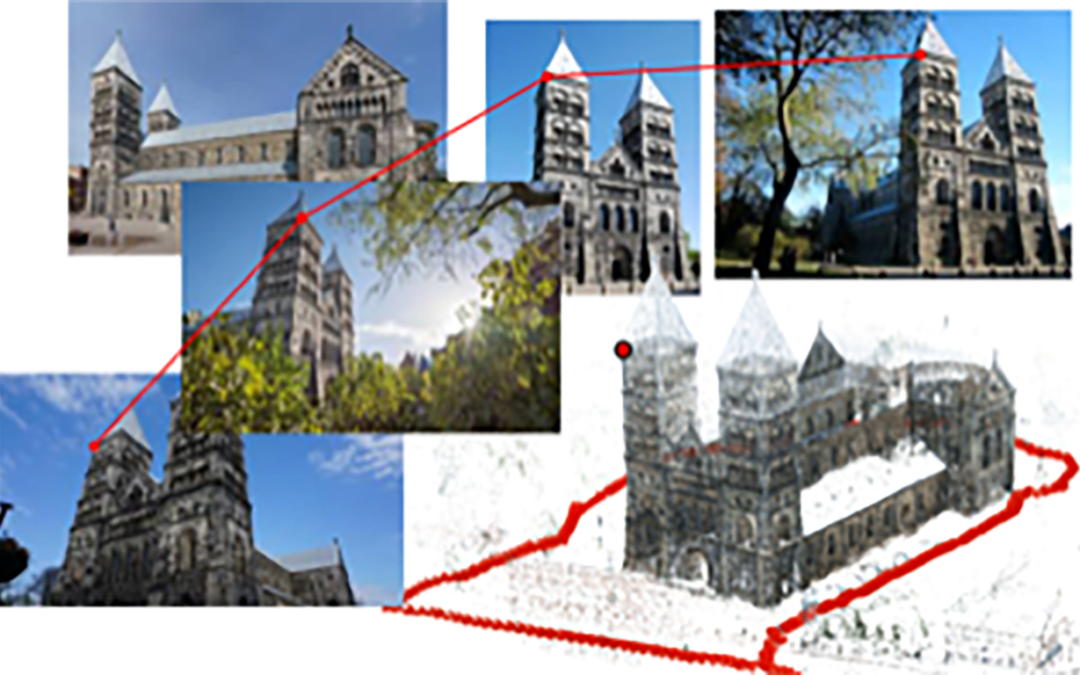
PI: Viktor Larsson (LU); co-PIs: Mårten Wadenbäck (LiU), Michael Felsberg (LiU) This project concerns 3D mapping methods which are used to enable re-localization and navigation in large-scale environments. In particular, we will focus on sparse reconstruction methods...

by Tove Kvarnström | Feb 28, 2023
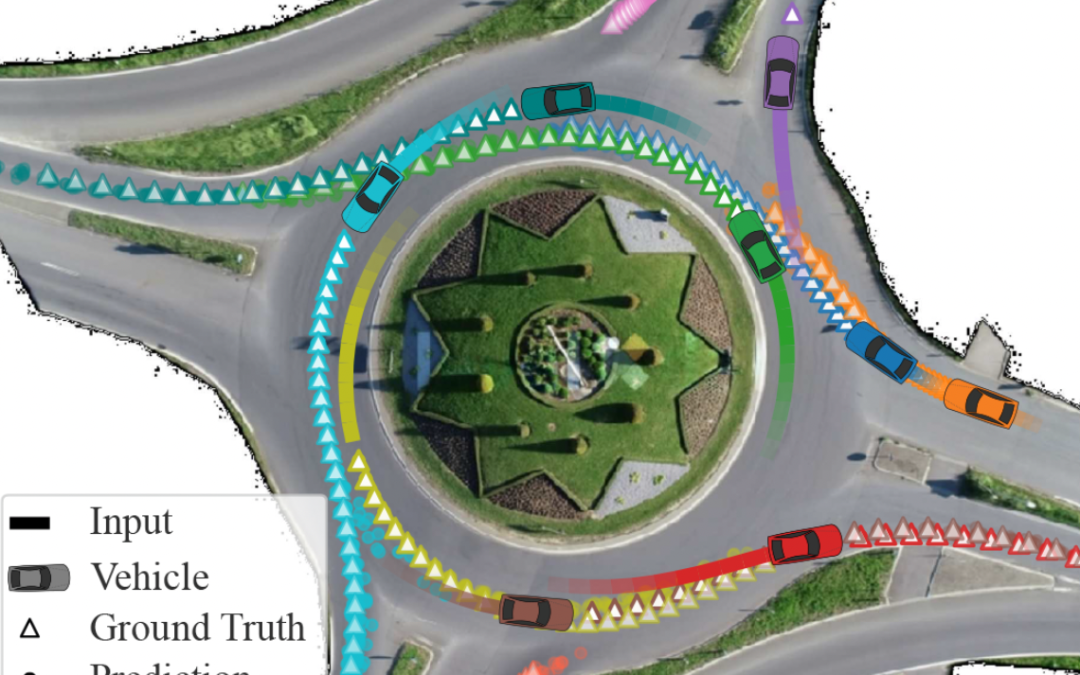
PI: Daniel Axehill (LiU); co-PI: Björn Olofsson (LU) The objective with the proposed research is to significantly extend the recent work by the PI’s former PhD students Oskar Ljungqvist and Kristoffer Bergman in the area of optimization-based motion planning and...

by Lena Tasse | May 3, 2021
PI: Tom Ziemke (LiU). Co-PIs/Collaborators: Jan Andersson (VTI), Anna Anund (VTI) The proposed project is a collaboration between the Cognition & Interaction Lab at IDA/LiU (PI: Tom Ziemke) and human factors researchers at VTI1 (co-PIs: Anna Anund and Jan...
by Lena Tasse | May 3, 2021
PI: Erik Frisk (LiU). Co-PIs: Lars Nielsen (LiU), Björn Olofsson (LiU). In this project we will develop techniques for fault-tolerant decision making and resilient behavioral control of autonomous ground vehicles in multi-vehicle traffic situations, strengthening an...
